RAPter: Rebuilding Man-made Scenes with Regular Arrangements of Planes
- Aron Monszpart1
- Nicolas Mellado1,2
- Gabriel J. Brostow1
- Niloy J. Mitra1
1University College London 2Université de Toulouse; UPS; IRIT
SIGGRAPH 2015

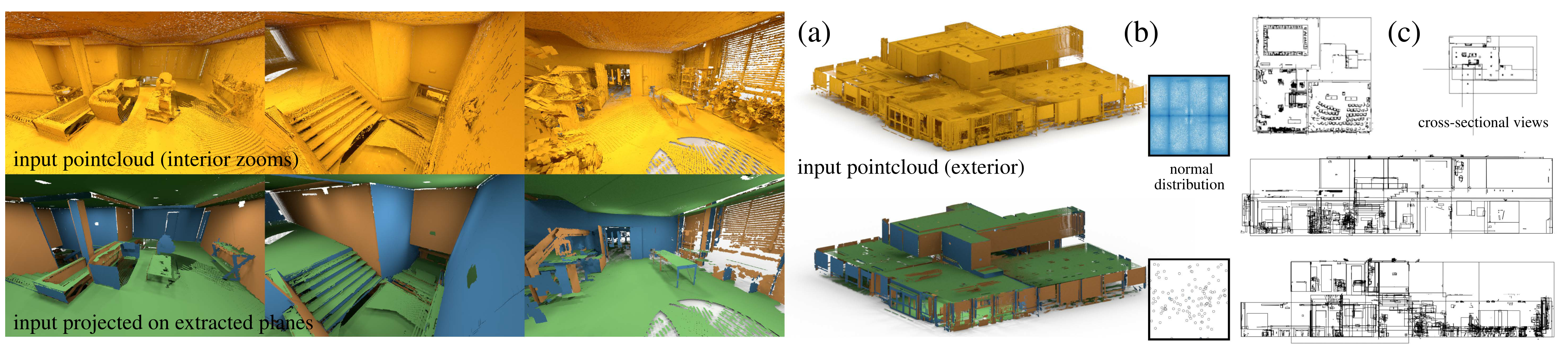
We present a novel approach to extract a Regular Arrangements of Planes (RAP) from an unstructured and noisy raw scan (shown in gold). (a) In this example, our algorithm reconstructs a building arrangement from a raw pointcloud, pre-assembled from multiple laser scans. (b) The distribution of the initial normals is very noisy in this scene, which makes any greedy arrangement of planes error-prone. Instead, we propose a global algorithm to simultaneously select both the planes along with their sparse inter-relations. (c) Cross-sectional views reveal discovered regularity of the extracted arrangement at multiple scales, e.g., walls, stairways, chairs, etc.
Abstract
With the proliferation of acquisition devices, gathering massive volumes of 3D data is now easy. Processing such large masses of pointclouds, however, remains a challenge. This is particularly a problem for raw scans with missing data, noise, and varying sampling density. In this work, we present a simple, scalable, yet powerful data reconstruction algorithm. We focus on reconstructing man-made scenes as regular arrangements of planes (RAP), thereby selecting both local plane-based approximations along with their global inter-plane relations. We propose a novel selection formulation to directly balance between data fitting and the simplicity of the resulting arrangement of extracted planes. The main technical contribution is a formulation that allows less-dominant orientations to still retain their internal regularity, and not being overwhelmed and regularized by the dominant scene orientations. We evaluate our approach on a variety of complex 2D and 3D pointclouds, and demonstrate the advantages over existing alternative methods.
Algorithm

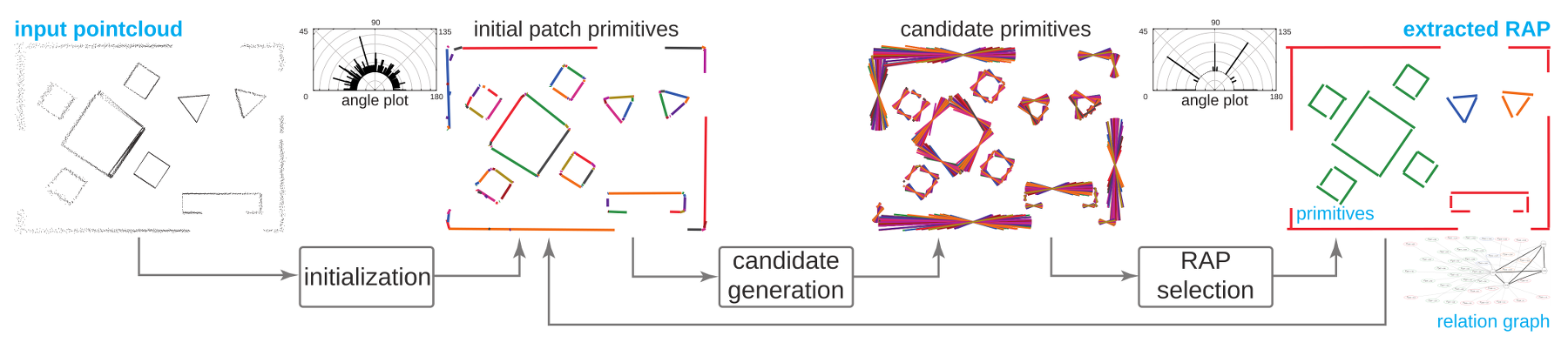
Algorithm overview. We present RAP TER to abstract a raw pointcloud by extracting a globally-coupled regular set of planar primitives (line segments in 2D) along with the inter-primitive relations. The method works in three main stages: (i) initialization, (ii) candidate generation; and (iii) regular arrangements of planes (RAP) selection. As an outer loop, we repeat this following a coarse-to-fine strategy with primitives at bigger scales regularizing extraction in regions of low confidence at smaller scales. Insets show the distribution of angles among normals of pairs of oriented points using the initial and final line segments and point-to-line assignments. Our method discovers the regularity among the lines, and enables weakly supported orientations retain their independence. Input angles: Θ = {0, π/3, π/2, 2π/3}.
Results

Starting from acquired pointclouds (a), our algorithm extracts Regular Arrangements of Planes (RAP). The extracted planes are used to reproject the associated points (b), or approximate the input by a set of planar polygons (c) (zoom shown in (d)). The normal distributions (Cartesian projection) of the input cloud (e) are very noisy. In contrast, the extracted RAP have clean normal distributions showing the extracted regularity (f). Circles denote normal locations and their support is indicated by the color of the circles, going from white (few samples) to blue (many samples). Parallel planes are shown with the same color (figures (b)-(d)), and input angles were Θ = {0, π/2}.

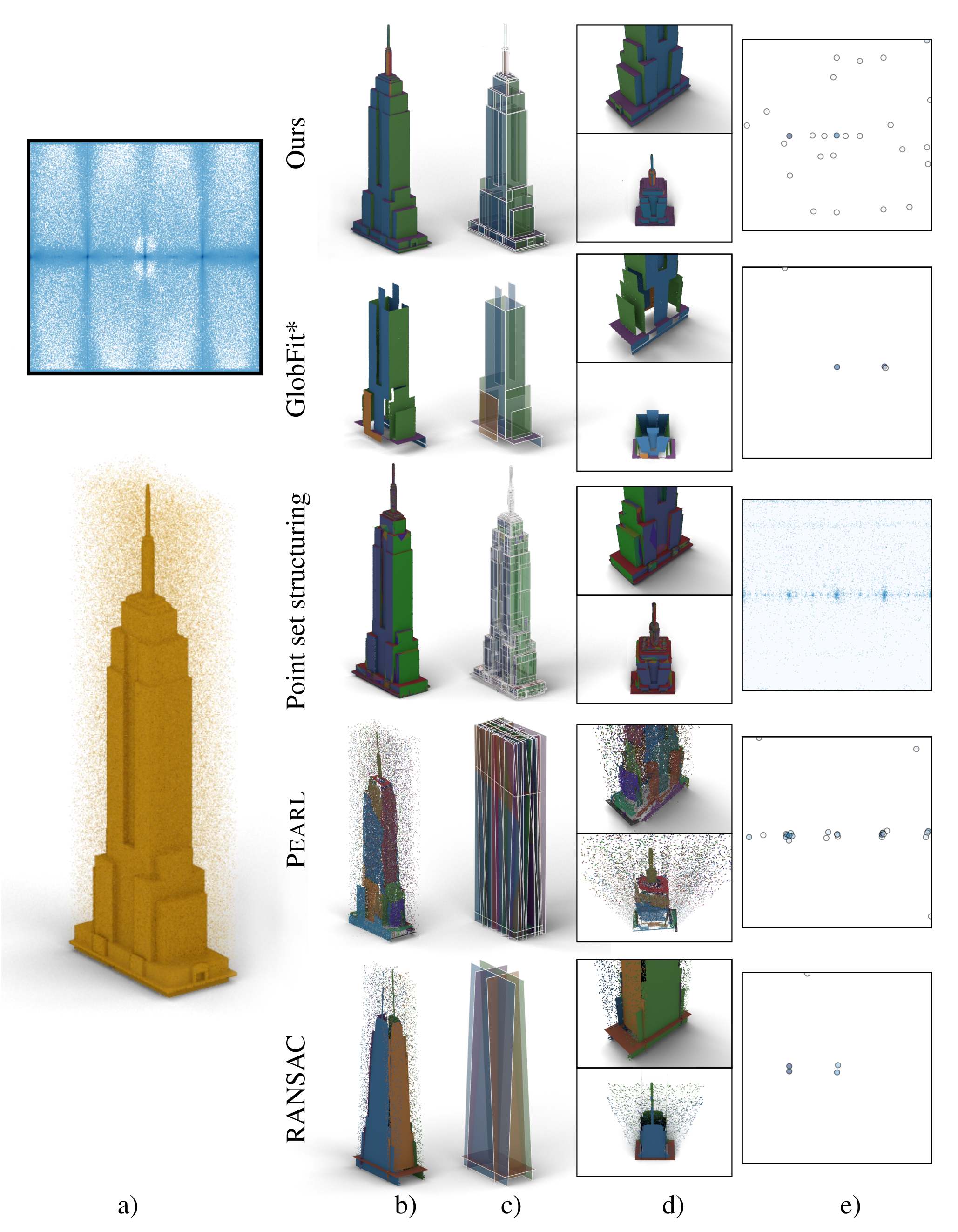
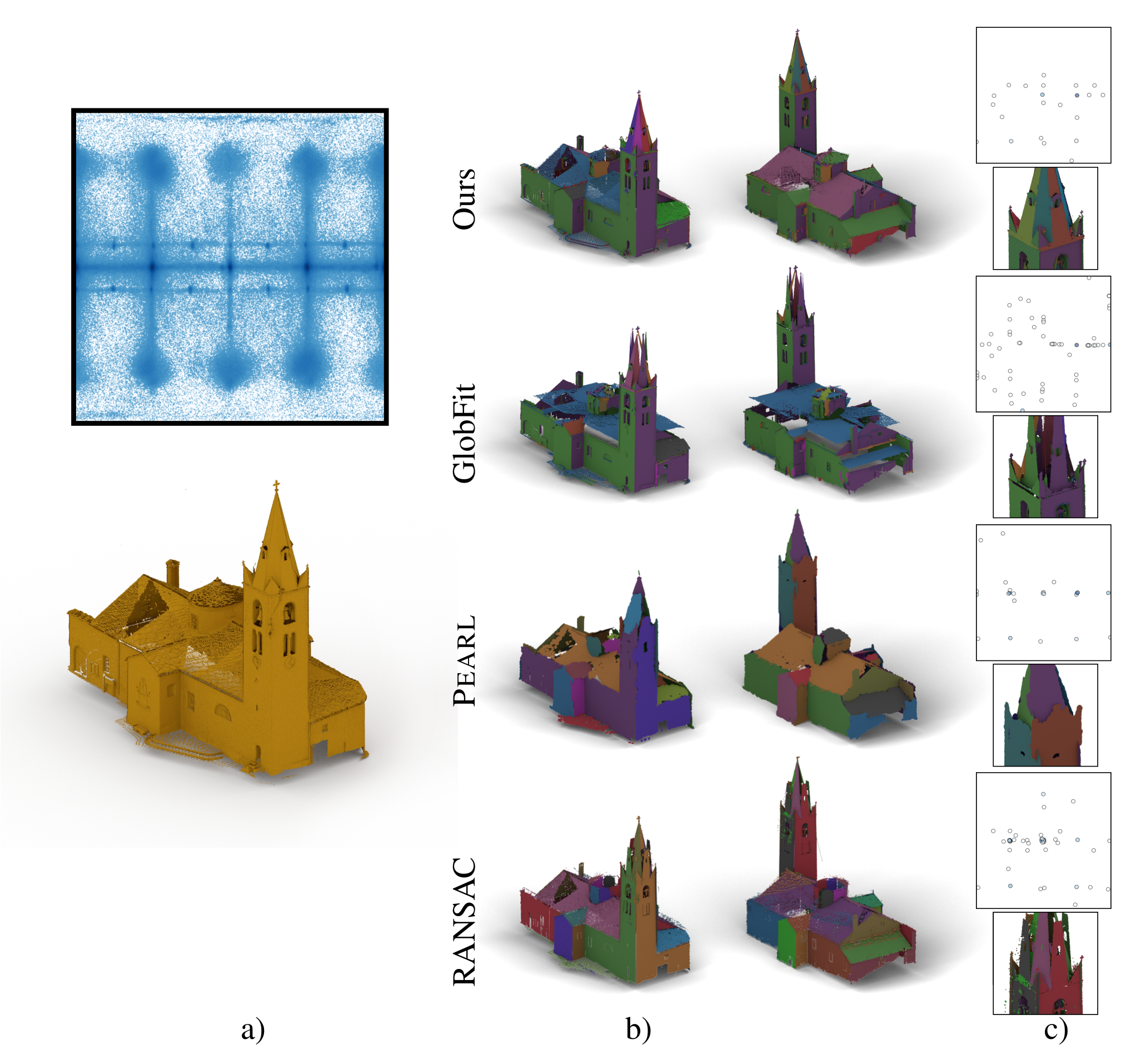
Comparison to other methods on “Empire” (a). We show points reprojected to associated planes (b), and approximated by a set of planar polygons (c) (zooms in (d)). Input (a-top) and output (e) normal distributions are mapped to 2D. Main difficulty here is detecting and segmenting structures of very different sizes whilst disregarding outliers. GlobFit only had the 13 (of ~4700) most supported planes as input. Input angles Θ = {0, π/2}.

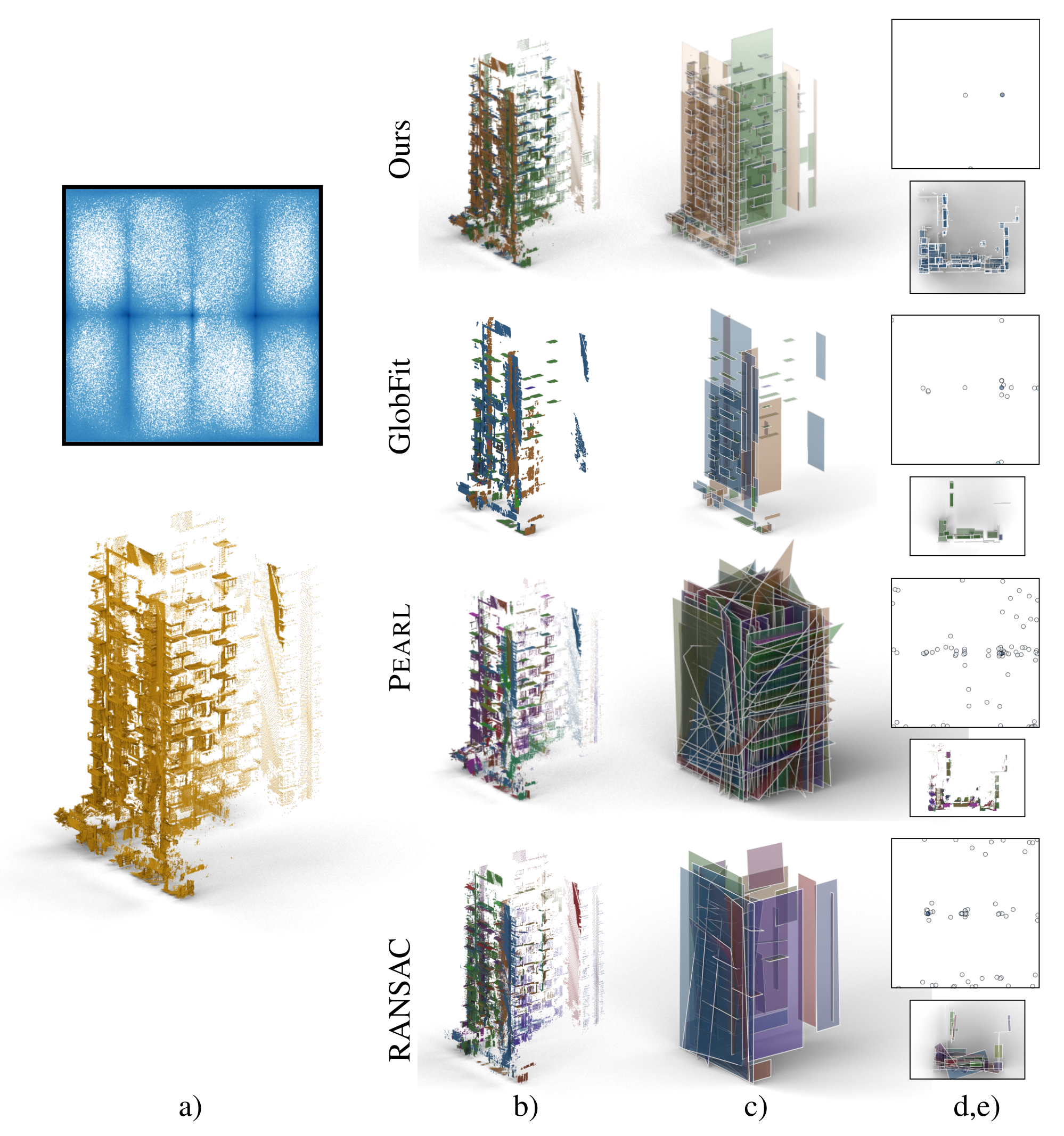
Comparison to other methods on the scene “Nola” (a). We show points reprojected to associated planes (b) and approximated by a set of planar polygons (c) (zooms in (d)). Input (a-top) and output (e) normal distributions are mapped to 2D. GlobFit had the largest 120 (of 15865) input planes. Input angles Θ = {0, π/2}

Comparison to other methods on “Lans” (a). (b) Points reprojected to associated planes and zooms in (c). Input (a-top) and output (c) normal distributions are mapped to 2D. GlobFit had 300 (of 7441) input planes. Input angles Θ = {0, π/2}.

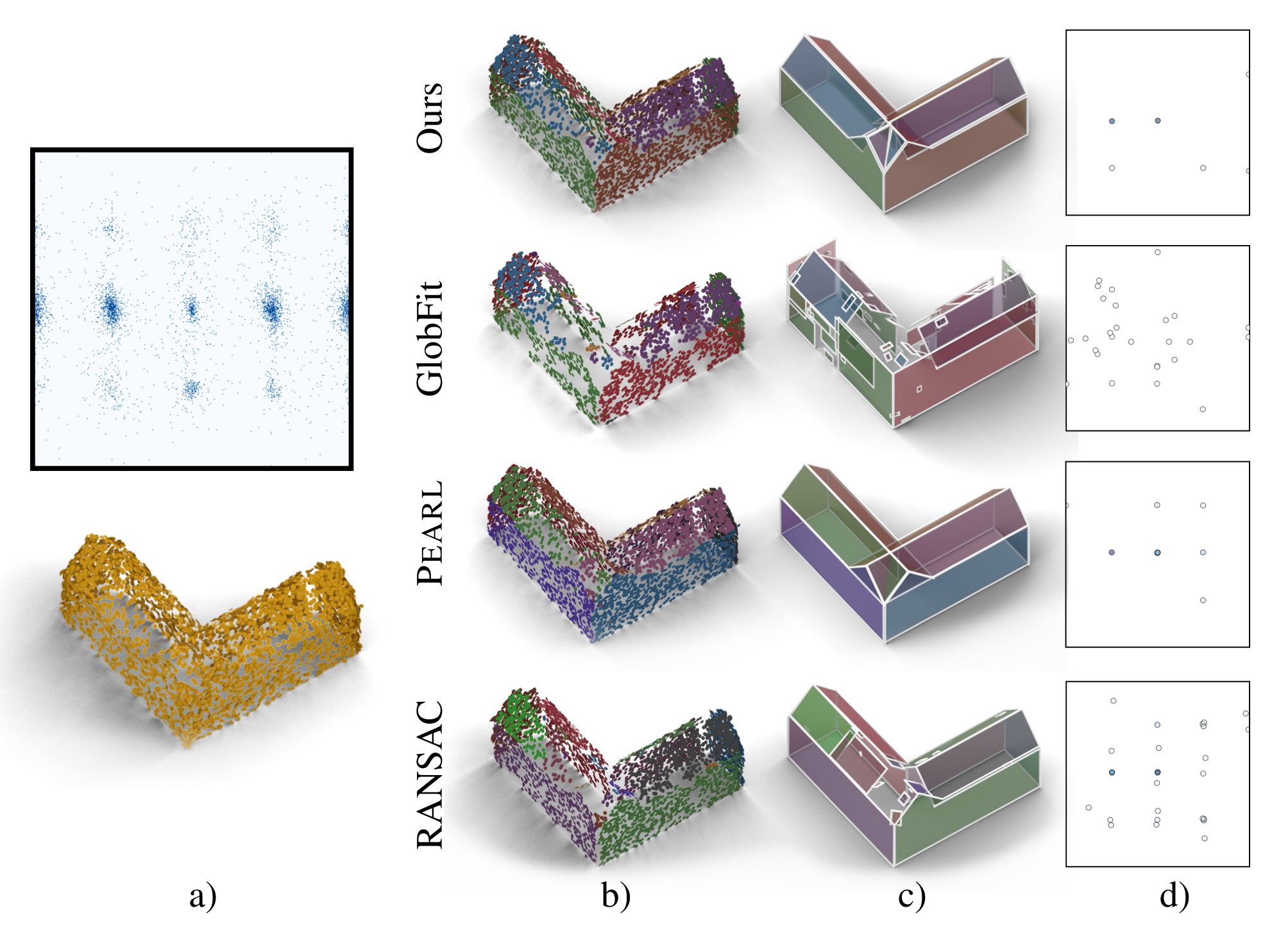
Comparison to other methods on “L-House” (a). We show points reprojected to associated planes (b), and approximated by a set of planar polygons (c). Input (a-top) and output (d) normal distributions are mapped to 2D. Input angles Θ = {0, π/2}.

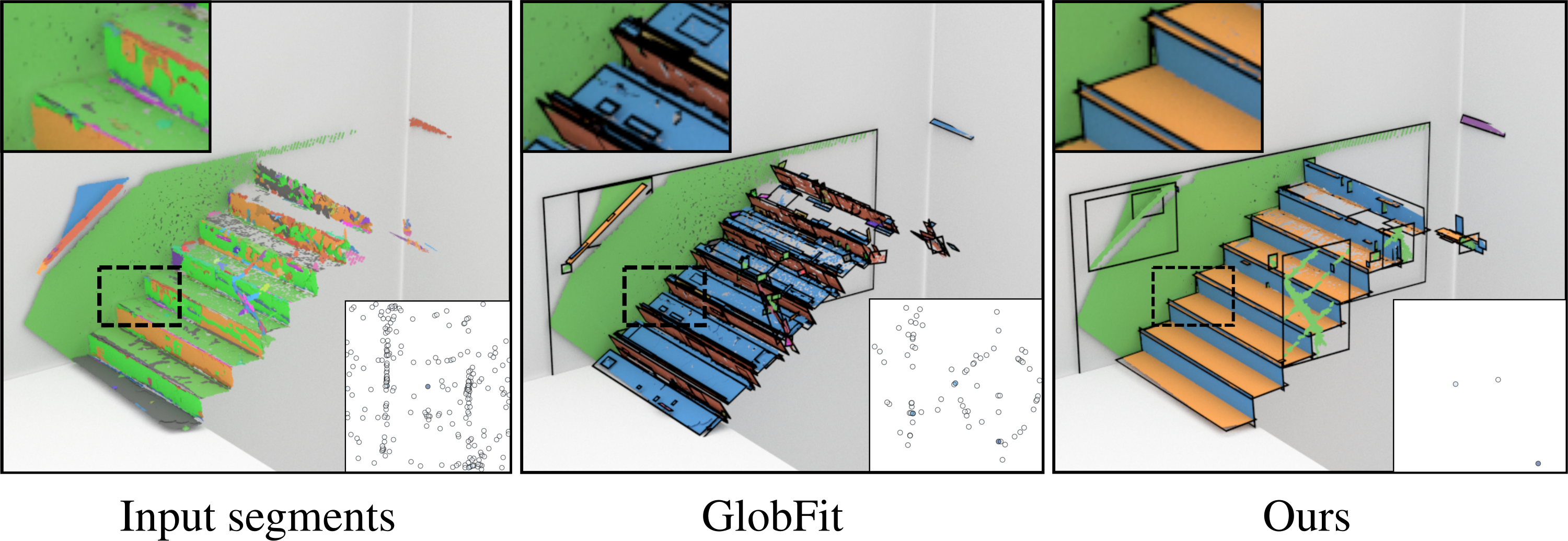
Comparison to [Li et al. 2011a] on a Kinect scan. The moderate number of input planes (300) prohibitively increases the likelihood that GlobFit will commit early to an irrelevant relation in the scene yielding over-regularization. There, stair steps were aligned to a single plane spanning the whole staircase, and risers were rotated orthogonally. In contrast, our approach correctly reconstructs the stairs, handlebars, and the wall, initialized with these 300 or all 1500 input planes. Input angles Θ = {0, π/2}.
Bibtex
@article{MonszpartEtAl:RAPter:2015,
title = {{RAP}ter: Rebuilding Man-made Scenes with Regular Arrangements of Planes},
author = {Monszpart, Aron and Mellado, Nicolas and Brostow, Gabriel J. and Mitra, Niloy J.},
journal = {ACM Trans. Graph.},
volume = {34},
number = {4},
year = {2015},
pages = {103:1--103:12},
articleno = {103},
numpages = {12}
}
Acknowledgements
We thank the reviewers for their comments and suggestions for improving the paper. Special thanks to Florent Lafarge for help with comparisons and datasets, Neil Smith and Hui Lin for additional datasets, David Vanderhaghe for his support, and Julian Straub for extra comparisons. We thank Simon Julier, Duygu Ceylan, Moos Hueting, Melinos Averkiou, Peter Hedman, James Hennessey, Clement Godard, Martin Kilian, Bongjin Koo
and Veronika Benis for invaluable comments, support and discussions. This work was supported in part by ERC Starting Grant SmartGeometry (StG-2013-335373), Marie Curie CIG, ANR Mapstyle project (ANR-12-COORD-0025)
and EU project CR-PLAY (no 611089) www.cr-play.eu.