Exploratory Design of Mechanical Devices with Motion Constraints
- Robin Roussel1,2
- Marie-Paule Cani2
- Jean-Claude Léon3
- Niloy J. Mitra1
1University College London 2LIX, École Polytechnique 3Grenoble Alpes University
Computer & Graphics 2018
Abstract
Mechanical devices are ubiquitous in our daily lives, and the motion they are able to transmit is often a critical part of their function. While digital fabrication devices facilitate their realization, motion-driven mechanism design remains a challenging task. We take drawing machines as a case study in exploratory design. Devices such as the Spirograph can generate intricate patterns from an assembly of simple mechanical elements. Trying to control and customize these patterns, however, is particularly hard, especially when the number of parts increases. We propose a novel constrained exploration method that enables a user to easily explore feasible drawings by directly indicating pattern preferences at different levels of control. The user starts by selecting a target pattern with the help of construction lines and rough sketching, and then fine-tunes it by prescribing geometric features of interest directly on the drawing. The designed pattern can then be directly realized with an easy-to-fabricate drawing machine. The key technical challenge is to facilitate the exploration of the high dimensional configuration space of such fabricable machines. To this end, we propose a novel method that dynamically reparameterizes the local configuration space and allows the user to move continuously between pattern variations, while preserving user-specified feature constraints. We tested our framework on several examples, conducted a user study, and fabricated a sample of the designed examples.
This paper is an extented version of SPIROU: Constrained Exploration for Mechanical Motion Design (SCF 2017).
Method
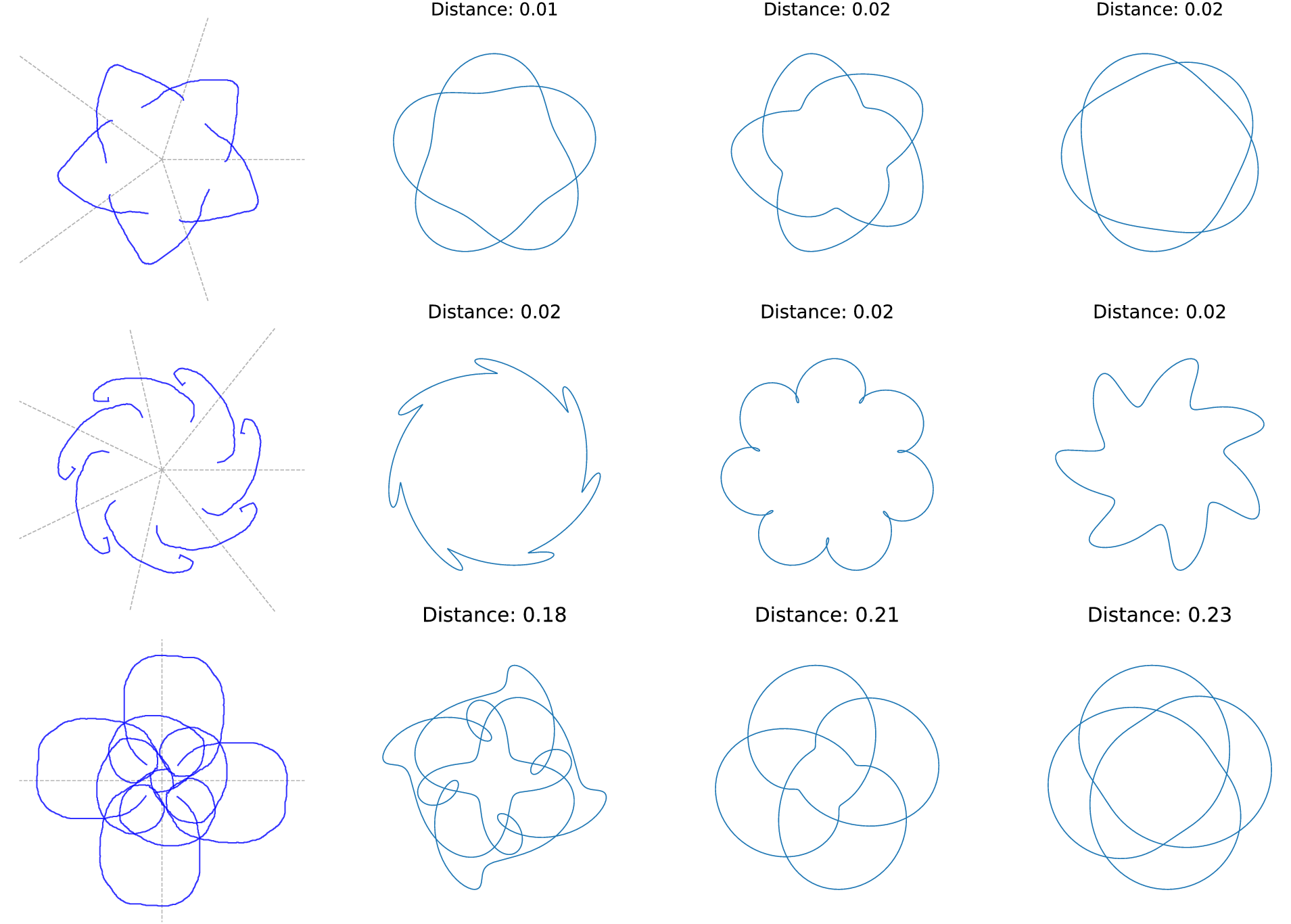
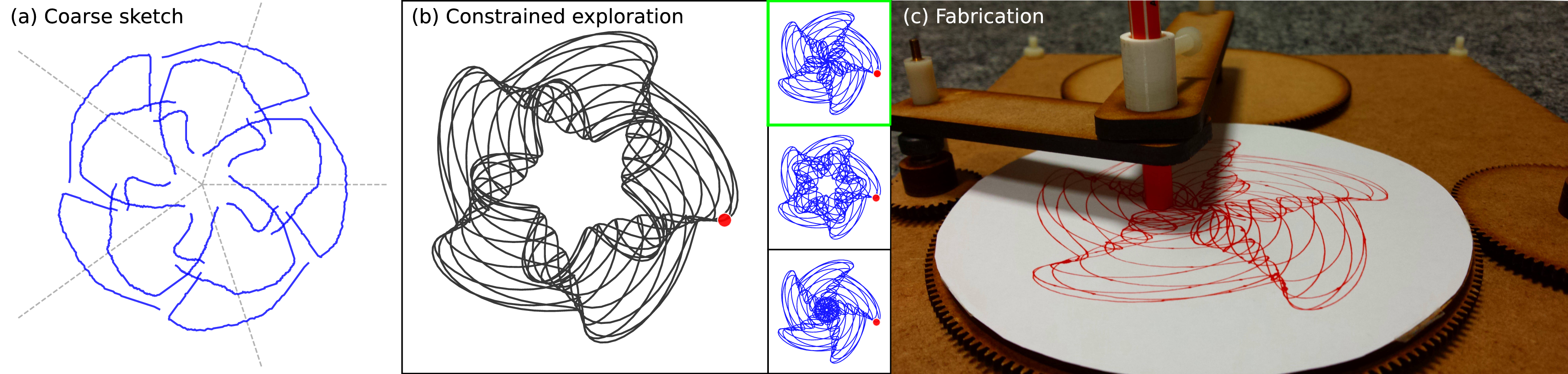
Pattern retrieval: starting from a user sketch (left), we retrieve the best matching patterns from a database of drawing machines. (Lower value indicates a closer match.)
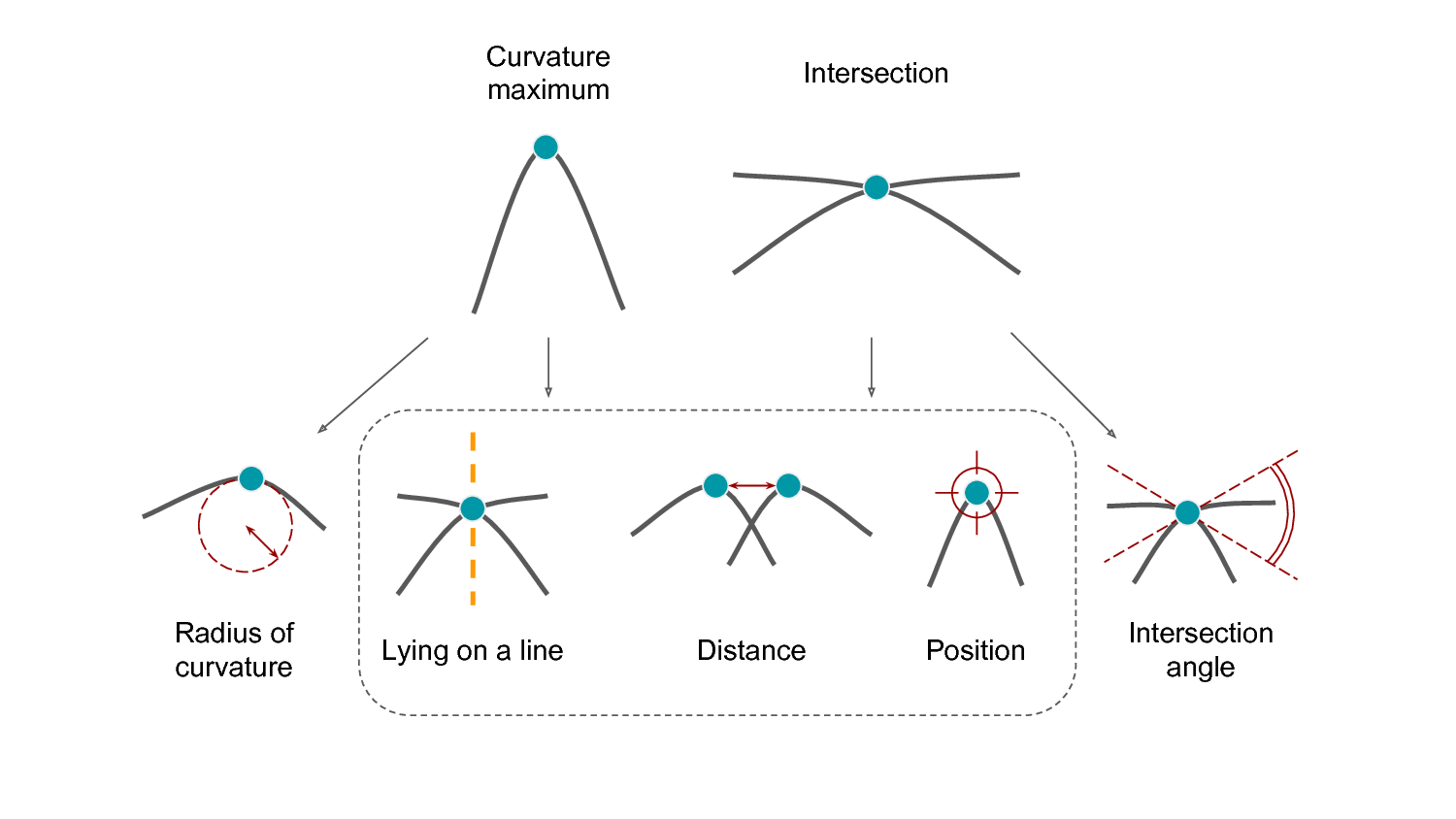
To edit the pattern while preserving features that the user likes, Points of Interest (and their associated geometric features) can be selected directly on the curve.
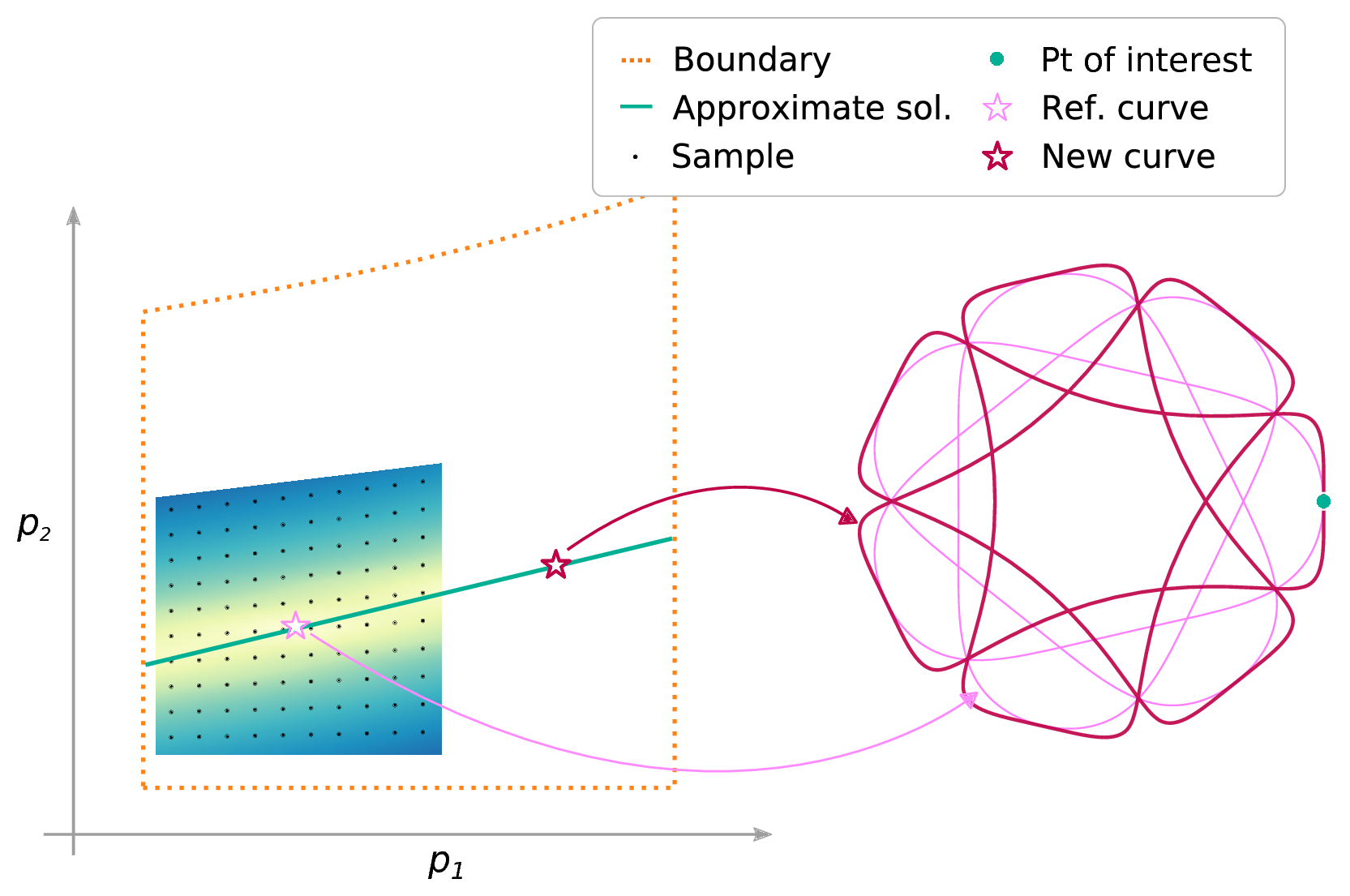
We allow the user to explore the region of the design space that respects these features. This region is approximated by (1) locally sampling the design space, (2) evaluating an invariance score (shown as a color map), and (3) performing a linear regression on the highest scoring samples (blue line). The initial solution is shown in pink; the new solution (maroon), obtained by exploring the restricted design space, has its rightmost point exactly at the same position, while the rest of the drawing has changed.
Results
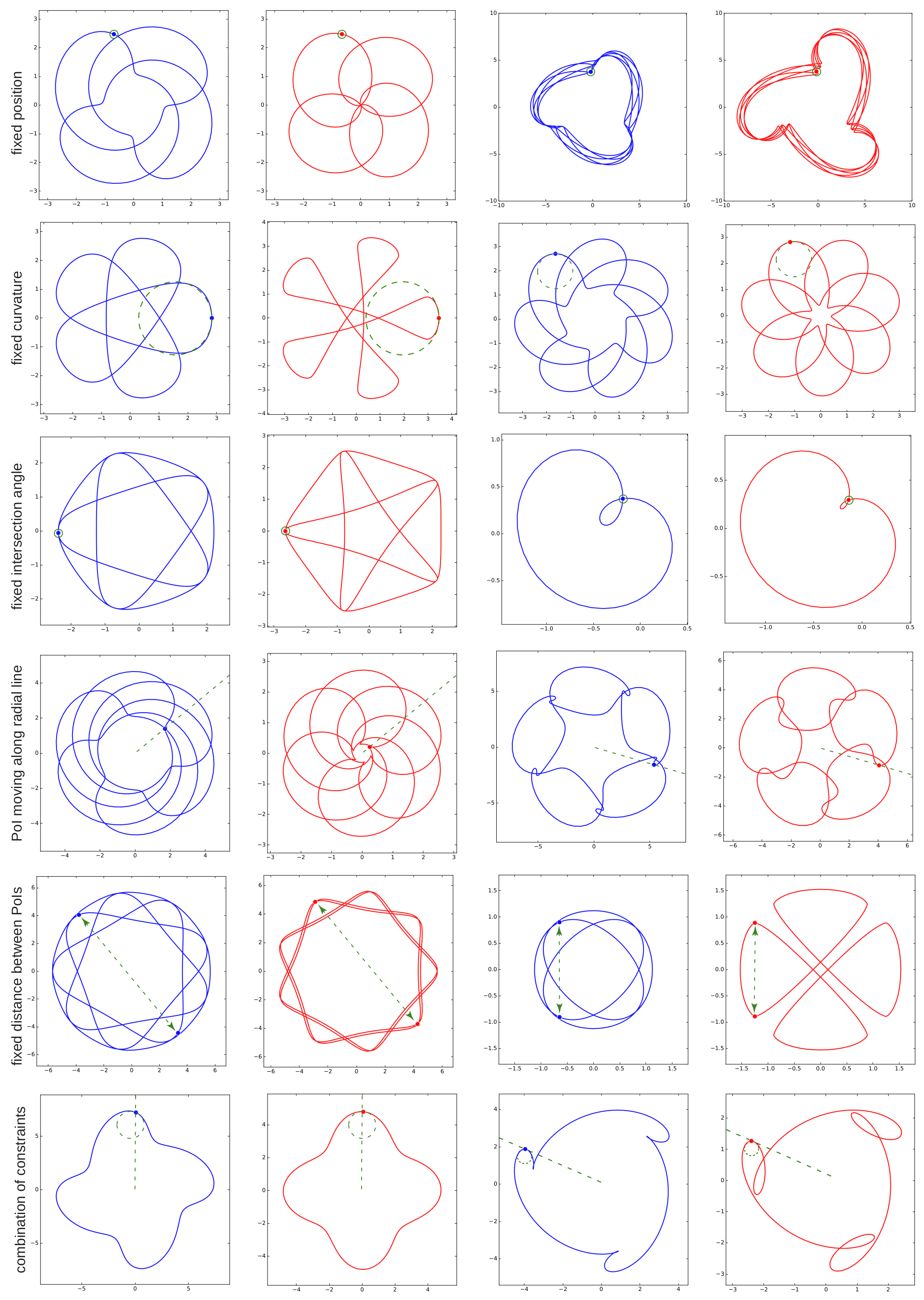
Examples of constrained variations obtained with our system (original curves in blue, modified in red). Our generated sliders allow significant visual changes to the curves, while respecting the visual constraints (one per row, two at the bottom).
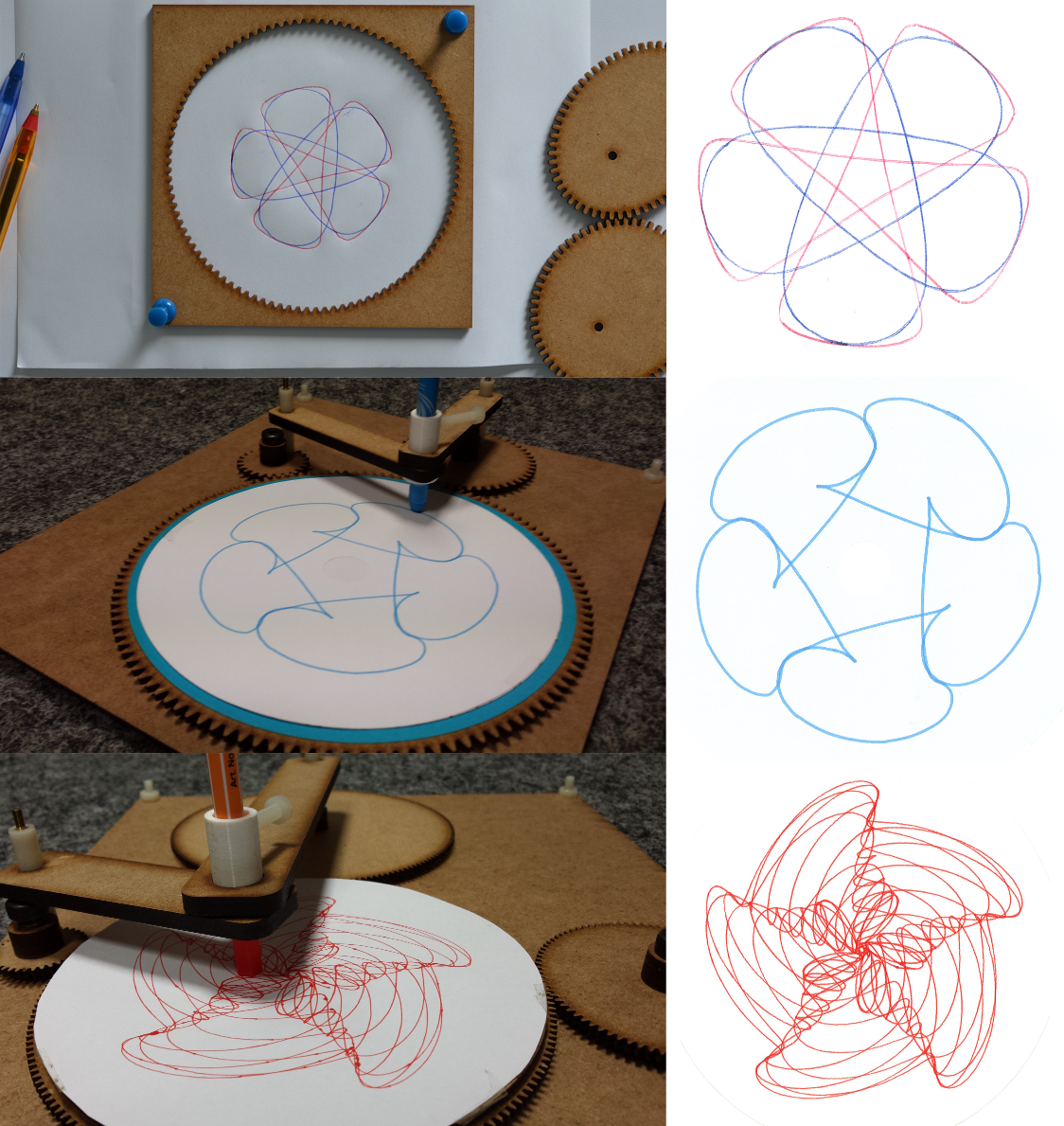
Examples of fabricated prototypes: (top) elliptic Spirograph with two curves drawn using a different elliptic gear; (middle and bottom) instances of the Hoot-Nanny. Drawn patterns on the right.
Bibtex
@article{RousselEtAl:DrawingMachines:CG:2018,
title = “Exploratory design of mechanical devices with motion constraints”,
journal = “Computers \& Graphics”,
volume = “74”,
pages = “244 - 256",
year = “2018”,
issn = “0097-8493",
doi = “https://doi.org/10.1016/j.cag.2018.05.023“,
url = “http://www.sciencedirect.com/science/article/pii/S0097849318300888”,
author = “Robin Roussel and Marie-Paule Cani and Jean-Claude L{\’e}on and Niloy J. Mitra”,
keywords = “Computational design, Design space, Constrained exploration, Drawing machines, Mechanical motion, Fabrication”
}
Acknowledgements
We are grateful to the anonymous reviewers for their valuable comments and suggestions. We also thank Aron Monszpart for proofreading the paper and Estelle Charleroy for helping with the video. This work was supported by the European Research Council Starting Grant SmartGeometry 335373 and Advanced Grant Expressive 291184, and gifts from Adobe. Prototypes were fabricated with the Equipex Amiqual4Home (ANR-11-EQPX-0002).